
Dragonfly 包含一系列指令,使其能充当自动控制器。具体来说,它可以根据预设触发条件,在特定情况下执行预先编制的动作。
我们可以定义多种“动作”和“触发条件”,并把它们关联起来,甚至可以让一个触发条件联动多个动作。虽然这属于高级功能,但我们可以针对各种情况为用户提供转向指导。
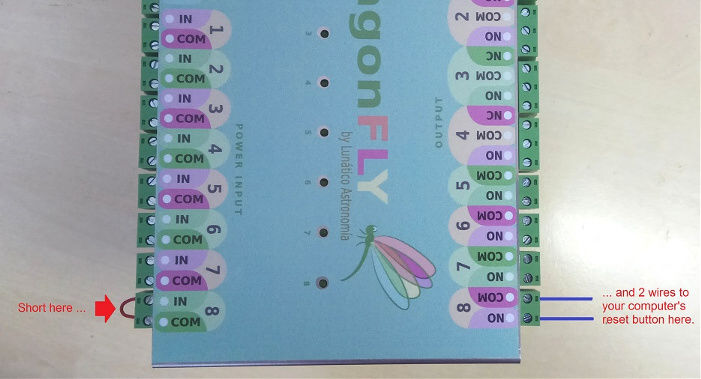
用户必须将计算机的重启按钮连接到 Dragonfly 的其中一个继电器上,本示例使用的是最后一个继电器,连接方式如下图所示:

Dragonfly 包含一系列指令,使其能充当自动控制器。具体来说,它可以根据预设触发条件,在特定情况下执行预先编制的动作。
我们可以定义多种“动作”和“触发条件”,并把它们关联起来,甚至可以让一个触发条件联动多个动作。虽然这属于高级功能,但我们可以针对各种情况为用户提供转向指导。
用户必须将计算机的重启按钮连接到 Dragonfly 的其中一个继电器上,本示例使用的是最后一个继电器,连接方式如下图所示: